Team History
2013 Ultimate Ascent
Silverfish
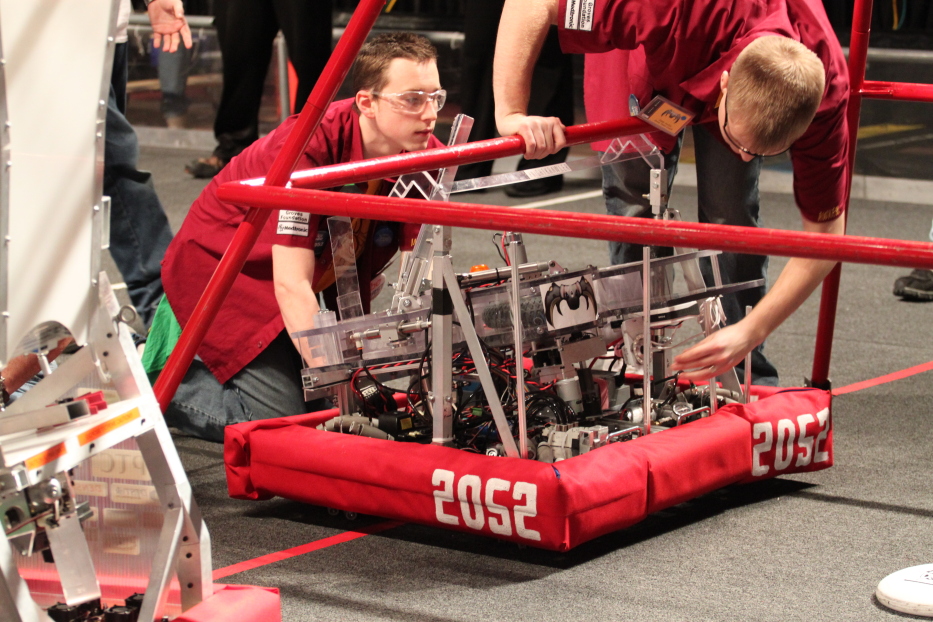
Robot Information
- The team worked hard on perfecting a secret weapon on the robot that could shoot and score from one end of the field to the other. We didn't actually utilize this until a critical finals match.
- The frisbies Silverfish shoots have to be caught with two hands because of how fast they spin.
- The robot was named "Silverfish" because of its mecanum wheels and short stature. The robot was nimble and hard to pin down, just like the silverfish we occasionally find in our build space.
Competitions and Awards
- Lake Superior Regional: Regional Winners, Judges’ Award
- Minnesota 10,000 Lakes Regional: Regional Winners
- FIRST Championships: Newton Division Quarterfinalists
- MSHSL FIRST State Championships: State Winners
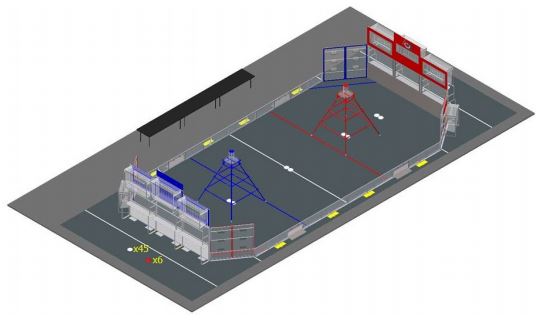
This game starts off with a 15 second autonomous period where robots are controlled autonomously. Robots control 11 inch Discs and score them in goals on the opponent’s side of the field. There are three goals above the opposing alliance’s drivers stations; the middle one is worth one point more than the other two. Another goal to one side of those drivers stations, closer to the ground. The final goal, and the one worth the most points, is at the top of that alliance’s Pyramid. In Endgame, robots score by climbing their Pyramid and are rewarded points depending on which level they climb on.

Winner
2013 Minnesota 10,000 Lakes Regional
Winner
2013 Lake Superior Regional
MSHSL/FIRST
2013 State Champion